STM32CubeMX系列教程19:Quad-SPI
一.Quad-SPI简介
在第十章和第十一章中,我们介绍了标准的SPI总线,SPI由四根线控制,NSS为片选,SCK为时钟信号线。MISO,MOSI为数据线,一根作为输入,一根作为输出。
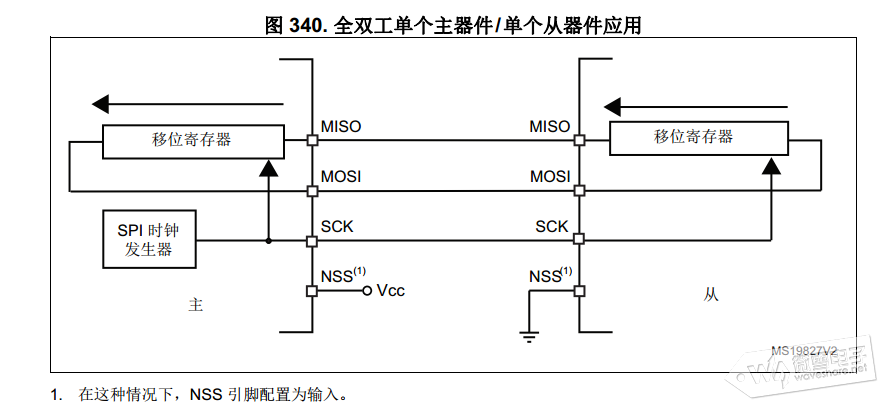
Quad-SPI,即四线SPI,由此可知其数据线比标准的SPI接口要多,最多支持四条数据线同时传输。
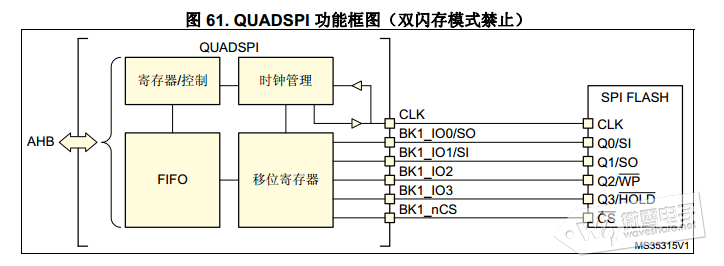
连接单、双或四(条数据线) SPI Flash 存储介质。Quad-SPI总共有6根控制线:CS为片选,CLK为时钟信号线。IO0~IO3为数据线,可以发送数据也可以接收数据。
二.Quad-SPI 命令序列
QUADSPI 通过命令与 Flash 通信 每条命令包括指令、地址、交替字节、空指令和数据这五个阶段 任一阶段均可跳过,但至少要包含指令、地址、交替字节或数据阶段之一。
nCS 在每条指令开始前下降,在每条指令完成后再次上升。
指令阶段
这一阶段将发送一条8位指令到flash,指定待执行的类型。指令可以单线,双线或四线传输。
地址阶段
在地址阶段,将1-4字节发送到flash,指示操作地址,地址阶段可一次发送 1 位(在单线 SPI 模式中通过 IO0)、2 位(在双线 SPI 模式中通过 IO0/IO1 )或 4 位(在四线 SPI 模式中通过 IO0/IO1/IO2/IO3)。
交替字节阶段
在交替字节阶段,将 1-4 字节发送到 Flash,一般用于控制操作模式。可以通过可以单线,双线或四线传输。空指令周期阶段
在空指令周期阶段,给定的 1-31个周期内不发送或接收任何数据,目的是当采用更高的时钟频率时,给 Flash 留出准备数据阶段的时间。
数据阶段 在数据阶段,可从 Flash 接收或向其发送任意数量的字节。数据阶段如果发送数据IO口为输出,如果是接收数据则IO切换为输入,一次可发送 1 位(在单线 SPI 模式中通过 IO0)、2 位(在双线 SPI 模式中通过 IO0/IO1 )或 4 位(在四线 SPI 模式中通过 IO0/IO1/IO2/IO3)。

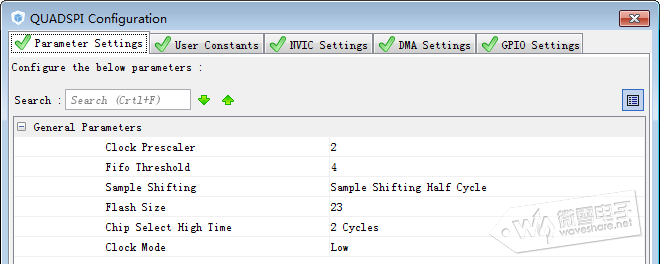
FIFO深度设置为4个字节,配置QSPI 在Flash 驱动信号后过半个CLK 周期才对Flash 驱动的数据采样。
Flash Size设置外部存储器大小,本实验以W25Q128FV芯片为例,大小为16MB(使用24位寻址),则设置为23。
四.应用程序
生成报告以及代码,编译程序。在quadspi.c文件中可以看到初始化函数。在stm32f7xx_hal_qspic.h头文件中可以看到QSPI的操作函数。分别对应轮询,中断和DMA三种控制方式。
下面为W25QXX的驱动文件。下载并添加进工程中。(操作方式参照第十一章)
在main.c文件中添加头文件
/* USER CODE BEGIN Includes */ #include <string.h> #include "stm32746g_qspi.h" /* USER CODE END Includes */</string.h>
声明变量: s_command为QSPI命令结构体,配置命令;pData存储读取ID值,rData,wData作为读写数据缓存
/* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ QSPI_CommandTypeDef s_command; uint8_t pData[3]; uint8_t wData[0x100]; uint8_t rData[0x100]; uint32_t i; /* USER CODE END PV */
在main函数中添加应用程序,第一部分初始化W25Q128FV芯片,第二部分分别用单线,双线和四线三种模式读设备ID。第三部分则是读写擦除芯片操作实验。
/* USER CODE BEGIN 2 */
printf("W25Q128FV QuadSPI Test ....\r\n\r\n");
/*##-1- Initialize W25Q128FV ###########################################*/
BSP_QSPI_Init();
/*##-2-Read Device ID Test ###########################################*/
/* Read Manufacture/Device ID */
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = READ_ID_CMD;
s_command.AddressMode = QSPI_ADDRESS_1_LINE;
s_command.AddressSize = QSPI_ADDRESS_24_BITS;
s_command.Address = 0x000000;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
s_command.DataMode = QSPI_DATA_1_LINE;
s_command.DummyCycles = 0;
s_command.NbData = 2;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
if (HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
if (HAL_QSPI_Receive(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
printf("SPI I/0 Read Device ID : 0x%2X 0x%2X\r\n",pData[0],pData[1]);
/* Read Manufacture/Device ID Dual I/O*/
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = DUAL_READ_ID_CMD;
s_command.AddressMode = QSPI_ADDRESS_2_LINES;
s_command.AddressSize = QSPI_ADDRESS_24_BITS;
s_command.Address = 0x000000;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_2_LINES;
s_command.AlternateBytesSize= QSPI_ALTERNATE_BYTES_8_BITS;
s_command.AlternateBytes = 0;
s_command.DataMode = QSPI_DATA_2_LINES;
s_command.DummyCycles = 0;
s_command.NbData = 4;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
if (HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
if (HAL_QSPI_Receive(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
printf("Dual I/O Read Device ID : 0x%2X 0x%2X\r\n",pData[0],pData[1]);
/* Read Manufacture/Device ID Quad I/O*/
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = QUAD_READ_ID_CMD;
s_command.AddressMode = QSPI_ADDRESS_4_LINES;
s_command.AddressSize = QSPI_ADDRESS_24_BITS;
s_command.Address = 0x000000;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_4_LINES;
s_command.AlternateBytesSize= QSPI_ALTERNATE_BYTES_8_BITS;
s_command.AlternateBytes = 0x00;
s_command.DataMode = QSPI_DATA_4_LINES;
s_command.DummyCycles = 4;
s_command.NbData = 2;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
if (HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
if (HAL_QSPI_Receive(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
printf("Quad I/O Read Device ID : 0x%2X 0x%2X\r\n",pData[0],pData[1]);
/* Read JEDEC ID */
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = READ_JEDEC_ID_CMD;
s_command.AddressMode = QSPI_ADDRESS_NONE;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
s_command.DataMode = QSPI_DATA_1_LINE;
s_command.DummyCycles = 0;
s_command.NbData = 3;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
if (HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
if (HAL_QSPI_Receive(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
printf("Read JEDEC ID : 0x%2X 0x%2X 0x%2X\r\n\r\n",pData[0],pData[1],pData[2]);
/*##-3-QSPI Erase/Write/Read Test ###########################################*/
/* fill buffer */
for(i =0;i<0x100;i ++)
{
wData[i] = i;
rData[i] = 0;
}
if(BSP_QSPI_Erase_Block(0) == QSPI_OK)
printf(" QSPI Erase Block ok\r\n");
else
Error_Handler();
if(BSP_QSPI_Write(wData,0x00,0x100)== QSPI_OK)
printf(" QSPI Write ok\r\n");
else
Error_Handler();
if(BSP_QSPI_Read(rData,0x00,0x100)== QSPI_OK)
printf(" QSPI Read ok\r\n\r\n");
else
Error_Handler();
printf("QSPI Read Data : \r\n");
for(i =0;i<0x100;i++)
printf("0x%02X ",rData[i]);
printf("\r\n\r\n");
for(i =0;i<0x100;i++)
if(rData[i] != wData[i])printf("0x%02X 0x%02X ",wData[i],rData[i]);
printf("\r\n\r\n");
/* check date */
if(memcmp(wData,rData,0x100) == 0 )
printf(" W25Q128FV QuadSPI Test OK\r\n");
else
printf(" W25Q128FV QuadSPI Test False\r\n");
/* USER CODE END 2 */
将W25QXX DataFlash Board模块插入到Open746I开发板I2C1中,编译程序并下载到开发板。打开串口调试助手。设置波特率为115200。串口助手上会显示如下信息。
五.程序讲解
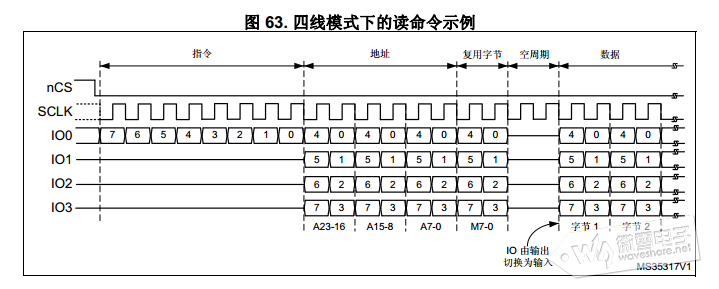
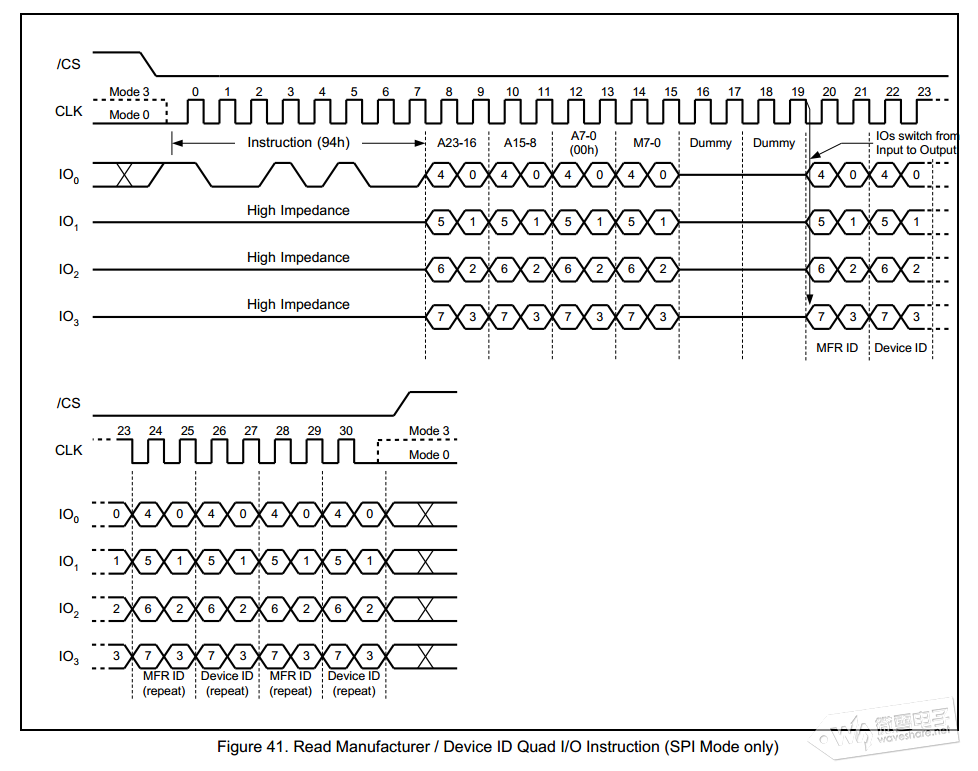
现在以四线读设备ID为例讲解QSPI如何进行一次读写操作。如下为四线读制造商/设备ID命令(94H)
程序中先根据上面时序配置s_command命令结构体,命令为1线,命令为QUAD_READ_ID_CMD,在w25q128fv.h头文件中宏定义为0x94。
地址为4线,地址长度为24位,地址为0x000000。
交替字节阶段设置为4线,长度为8位,备用字节为0x00。
空指令阶段为4个时钟周期
数据为4线,字节为两个字节。
程序中先通过HAL_QSPI_Command()将命令发送出去,然后通过HAL_QSPI_Receive()命令接收数据。即完成一次读操作,如果是写操作,同样是先配置命令结构体,然后发送命令,最后通过HAL_QSPI_Transmit()命令发送数据。
/* Read Manufacture/Device ID Quad I/O*/
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = QUAD_READ_ID_CMD;
s_command.AddressMode = QSPI_ADDRESS_4_LINES;
s_command.AddressSize = QSPI_ADDRESS_24_BITS;
s_command.Address = 0x000000;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_4_LINES;
s_command.AlternateBytesSize= QSPI_ALTERNATE_BYTES_8_BITS;
s_command.AlternateBytes = 0x00;
s_command.DataMode = QSPI_DATA_4_LINES;
s_command.DummyCycles = 4;
s_command.NbData = 2;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
if (HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
if (HAL_QSPI_Receive(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
Error_Handler();
}
printf("Quad I/O Read Device ID : 0x%2X 0x%2X\r\n",pData[0],pData[1]);
关于W25Q128fv的读写擦除等驱动函数可以查看stm32746g-qspi.c文件,这里不再详细讲解。打赏
 支付宝打赏
支付宝打赏
 微信打赏
微信打赏
支付宝打赏
微信打赏