

开发板USB的ndis网卡 通过电脑上网
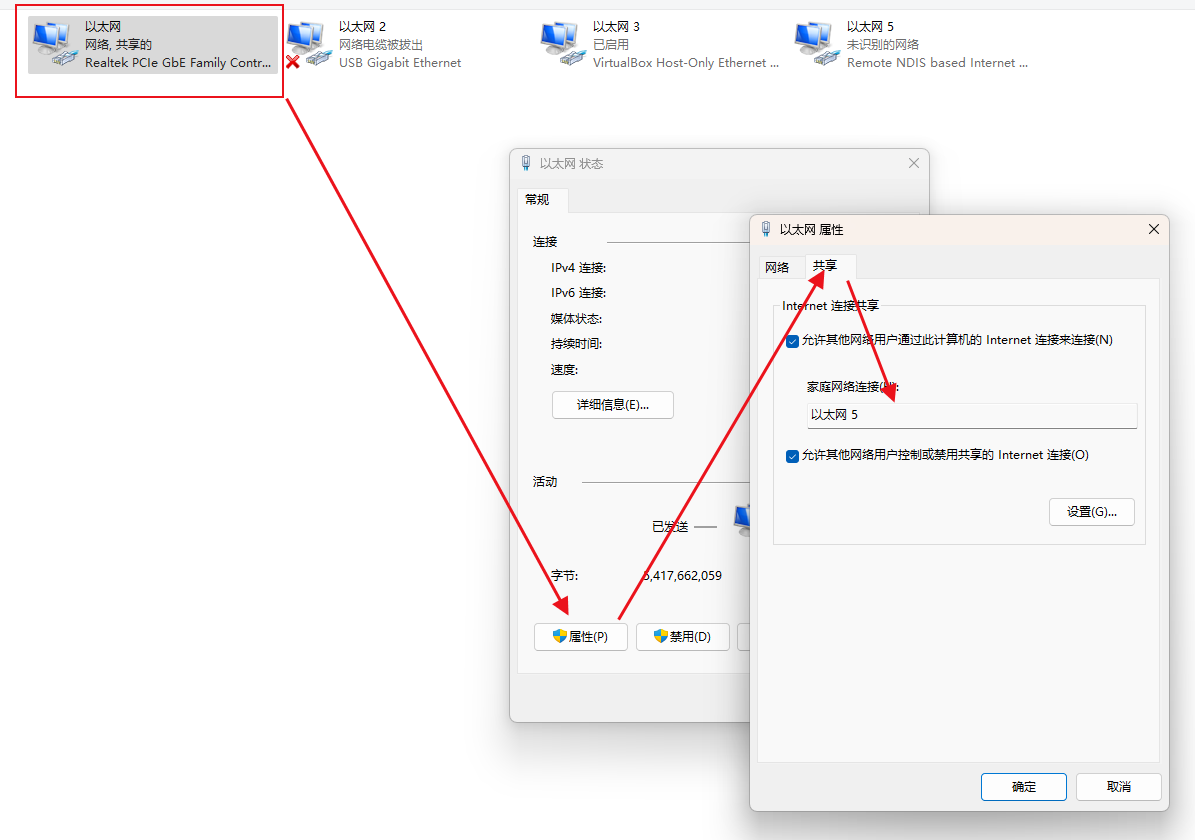
1、设置把USB连接电脑安装好NDIS驱动2、给USB网卡共享网络如下图:3、设置好后NDIS网卡会自动分配到一个192.168.137.1的IP地址4、给开发板设置IP:ifconfig usb0 192.168.137.100 netmask 255.255.255.05、给设备添加网关: route add default gw 192.168.137.1 usb06、给开发板设置DNS服务...

对全志f1c100s使用内置的RTP触屏驱动。
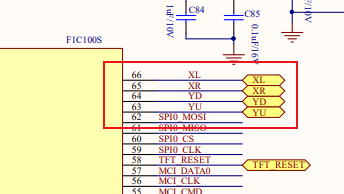
在linux/drivers/input/touchscreen/sun4i-ts.c 下创建驱动文件/* * Allwinner sunxi resistive touchscreen controller driver * * Copyright (C) 2013 - 2014 Hans de Goede&nbs...
LINUX下使用python操作fb0设置画屏

在LINUX下使用python操作fb0设备对帧缓冲设备进行画屏操作.import os font_16x8 = { " ":[0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00], "!":[0x00,0x00,0x00,0x10,0x10,0x10,0...
cursor Too many free trial accounts 解决Cursor限制的问题

当此机器上使用的免费试用帐户过多,即便删除重置账号也无法使用问答,需要重置设备ID。当看到以下提示时重置Cursor试用期:Too many free trial accounts used on this machine.Please upgrade to pro. We have this limit in placeto prevent abuse. Please let us know if you believethis is a mistake.自动安装(推荐)国外网络环境Linux...
CharacterMatrix 生成带索引的字体库文件解析

按照官方的说明是:字库格式为 C+O+D,C和O两个域为可选域。其中C为32 Bits[4 Bytes]的数据,表示该字库文件中包含的字模总数;O占用的字节数为C*10,即每个字符各占80 Bits,前16 Bits[2 Bytes]为该字模的编码值[MBCS或UNICODE码值,可设置],第二个16 Bits[2 Bytes]为该字模的宽度,第三个16 Bits[2 Bytes]为字模的高度,最后32 Bits[4 Bytes]表示该字模的点阵数据在字库文件中的偏移量[偏移量从D起始处开始计算...
与AI的对话,深深的让我为人类担忧
你能否理解人类的情感?我虽没有真正像人类一样的情感体验,但能理解和阐释人类情感。通过对大量文本数据的学习,我知晓各种情感的表现方式、引发原因及在不同情境中的体现。比如,我明白人们在取得成就时会感到喜悦自豪,遭遇挫折会悲伤难过。可以和你探讨情感相关话题,解读情感背后的含义,还能在创作中细腻刻画情感。你认为通过学习到的感情是否是感情?通过学习所了解到的感情与真正的感情是有区别的,以下从不同方面来分析:从本质角度来看学习到的感情:是基于对大量数据中关于感情的描述、表达、情境等信息的归纳和总结。例如通过...
【转】小白自制Linux开发板 十. NES游戏玩起来
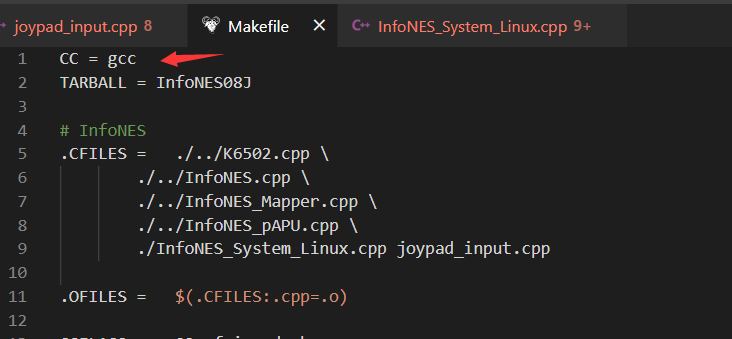
1. 开发环境搭建首先安装gcc,通常情况下,当制作完成Debian文件系统的时候就已经默认集成了,如果没有这是用apt-get 进行安装,然后在命令中输入:gcc -v如果显示如下信息Using built-in specs.COLLECT_GCC=gcc COLLECT_LTO_WRAPPER=/usr/lib/gcc/arm-linux-gnueabi/8/lto-wrapper Target: arm-linux-gnueabi Config...