对全志f1c100s使用内置的RTP触屏驱动。
在linux/drivers/input/touchscreen/sun4i-ts.c 下创建驱动文件
/*
* Allwinner sunxi resistive touchscreen controller driver
*
* Copyright (C) 2013 - 2014 Hans de Goede <hdegoede@redhat.com>
*
* The hwmon parts are based on work by Corentin LABBE which is:
* Copyright (C) 2013 Corentin LABBE <clabbe.montjoie@gmail.com>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*/
/*
* The sun4i-ts controller is capable of detecting a second touch, but when a
* second touch is present then the accuracy becomes so bad the reported touch
* location is not useable.
*
* The original android driver contains some complicated heuristics using the
* aprox. distance between the 2 touches to see if the user is making a pinch
* open / close movement, and then reports emulated multi-touch events around
* the last touch coordinate (as the dual-touch coordinates are worthless).
*
* These kinds of heuristics are just asking for trouble (and don't belong
* in the kernel). So this driver offers straight forward, reliable single
* touch functionality only.
*
* s.a. A20 User Manual "1.15 TP" (Documentation/arm/sunxi/README)
* (looks like the description in the A20 User Manual v1.3 is better
* than the one in the A10 User Manual v.1.5)
*/
#include <linux/err.h>
#include <linux/hwmon.h>
#include <linux/thermal.h>
#include <linux/init.h>
#include <linux/input.h>
#include <linux/interrupt.h>
#include <linux/io.h>
#include <linux/module.h>
#include <linux/of_platform.h>
#include <linux/platform_device.h>
#include <linux/slab.h>
#define TP_CTRL0 0x00
#define TP_CTRL1 0x04
#define TP_CTRL2 0x08
#define TP_CTRL3 0x0c
#define TP_INT_FIFOC 0x10
#define TP_INT_FIFOS 0x14
#define TP_TPR 0x18
#define TP_CDAT 0x1c
#define TEMP_DATA 0x20
#define TP_DATA 0x24
/* TP_CTRL0 bits */
#define ADC_FIRST_DLY(x) ((x) << 24) /* 8 bits */
#define ADC_FIRST_DLY_MODE(x) ((x) << 23)
#define ADC_CLK_SEL(x) ((x) << 22)
#define ADC_CLK_DIV(x) ((x) << 20) /* 3 bits */
#define FS_DIV(x) ((x) << 16) /* 4 bits */
#define T_ACQ(x) ((x) << 0) /* 16 bits */
/* TP_CTRL1 bits */
#define STYLUS_UP_DEBOUN(x) ((x) << 12) /* 8 bits */
#define STYLUS_UP_DEBOUN_EN(x) ((x) << 9)
#define TOUCH_PAN_CALI_EN(x) ((x) << 6)
#define TP_DUAL_EN(x) ((x) << 5)
#define TP_MODE_EN(x) ((x) << 4)
#define TP_ADC_SELECT(x) ((x) << 3)
#define ADC_CHAN_SELECT(x) ((x) << 0) /* 3 bits */
#define SUN4I_TP_EN(x) ((x) << 5)
#define SUN4I_TP_DUAL_EN(x) ((x) << 6)
#define SUN4I_TP_CALI_EN(x) ((x) << 7)
/* on sun6i, bits 3~6 are left shifted by 1 to 4~7 */
#define SUN6I_TP_MODE_EN(x) ((x) << 5)
/* TP_CTRL2 bits */
#define TP_SENSITIVE_ADJUST(x) ((x) << 28) /* 4 bits */
#define TP_MODE_SELECT(x) ((x) << 26) /* 2 bits */
#define PRE_MEA_EN(x) ((x) << 24)
#define PRE_MEA_THRE_CNT(x) ((x) << 0) /* 24 bits */
/* TP_CTRL3 bits */
#define FILTER_EN(x) ((x) << 2)
#define FILTER_TYPE(x) ((x) << 0) /* 2 bits */
/* TP_INT_FIFOC irq and fifo mask / control bits */
#define TEMP_IRQ_EN(x) ((x) << 18)
#define OVERRUN_IRQ_EN(x) ((x) << 17)
#define DATA_IRQ_EN(x) ((x) << 16)
#define TP_DATA_XY_CHANGE(x) ((x) << 13)
#define FIFO_TRIG(x) ((x) << 8) /* 5 bits */
#define DATA_DRQ_EN(x) ((x) << 7)
#define FIFO_FLUSH(x) ((x) << 4)
#define TP_UP_IRQ_EN(x) ((x) << 1)
#define TP_DOWN_IRQ_EN(x) ((x) << 0)
/* TP_INT_FIFOS irq and fifo status bits */
#define TEMP_DATA_PENDING BIT(18)
#define FIFO_OVERRUN_PENDING BIT(17)
#define FIFO_DATA_PENDING BIT(16)
#define TP_IDLE_FLG BIT(2)
#define TP_UP_PENDING BIT(1)
#define TP_DOWN_PENDING BIT(0)
/* TP_TPR bits */
#define TEMP_ENABLE(x) ((x) << 16)
#define TEMP_PERIOD(x) ((x) << 0) /* t = x * 256 * 16 / clkin */
struct sun4i_ts_data {
struct device *dev;
struct input_dev *input;
void __iomem *base;
unsigned int irq;
bool ignore_fifo_data;
int temp_data;
int temp_offset;
int temp_step;
};
static void sun4i_ts_irq_handle_input(struct sun4i_ts_data *ts, u32 reg_val)
{
u32 x, y;
if (reg_val & FIFO_DATA_PENDING) {
x = readl(ts->base + TP_DATA);
y = readl(ts->base + TP_DATA);
/* The 1st location reported after an up event is unreliable */
if (!ts->ignore_fifo_data) {
input_report_abs(ts->input, ABS_X, x);
input_report_abs(ts->input, ABS_Y, y);
/*
* The hardware has a separate down status bit, but
* that gets set before we get the first location,
* resulting in reporting a click on the old location.
*/
input_report_key(ts->input, BTN_TOUCH, 1);
input_sync(ts->input);
} else {
ts->ignore_fifo_data = false;
}
}
if (reg_val & TP_UP_PENDING) {
ts->ignore_fifo_data = true;
input_report_key(ts->input, BTN_TOUCH, 0);
input_sync(ts->input);
}
}
static irqreturn_t sun4i_ts_irq(int irq, void *dev_id)
{
struct sun4i_ts_data *ts = dev_id;
u32 reg_val;
reg_val = readl(ts->base + TP_INT_FIFOS);
if (reg_val & TEMP_DATA_PENDING)
ts->temp_data = readl(ts->base + TEMP_DATA);
if (ts->input)
sun4i_ts_irq_handle_input(ts, reg_val);
writel(reg_val, ts->base + TP_INT_FIFOS);
return IRQ_HANDLED;
}
static int sun4i_ts_open(struct input_dev *dev)
{
struct sun4i_ts_data *ts = input_get_drvdata(dev);
/* Flush, set trig level to 1, enable temp, data and up irqs */
writel(TEMP_IRQ_EN(1) | DATA_IRQ_EN(1) | FIFO_TRIG(1) | FIFO_FLUSH(1) |
TP_UP_IRQ_EN(1), ts->base + TP_INT_FIFOC);
return 0;
}
static void sun4i_ts_close(struct input_dev *dev)
{
struct sun4i_ts_data *ts = input_get_drvdata(dev);
/* Deactivate all input IRQs */
writel(TEMP_IRQ_EN(1), ts->base + TP_INT_FIFOC);
}
static int sun4i_get_temp(const struct sun4i_ts_data *ts, int *temp)
{
/* No temp_data until the first irq */
if (ts->temp_data == -1)
return -EAGAIN;
*temp = ts->temp_data * ts->temp_step - ts->temp_offset;
return 0;
}
static int sun4i_get_tz_temp(void *data, int *temp)
{
return sun4i_get_temp(data, temp);
}
static const struct thermal_zone_of_device_ops sun4i_ts_tz_ops = {
.get_temp = sun4i_get_tz_temp,
};
static ssize_t show_temp(struct device *dev, struct device_attribute *devattr,
char *buf)
{
struct sun4i_ts_data *ts = dev_get_drvdata(dev);
int temp;
int error;
error = sun4i_get_temp(ts, &temp);
if (error)
return error;
return sprintf(buf, "%d\n", temp);
}
static ssize_t show_temp_label(struct device *dev,
struct device_attribute *devattr, char *buf)
{
return sprintf(buf, "SoC temperature\n");
}
static DEVICE_ATTR(temp1_input, S_IRUGO, show_temp, NULL);
static DEVICE_ATTR(temp1_label, S_IRUGO, show_temp_label, NULL);
static struct attribute *sun4i_ts_attrs[] = {
&dev_attr_temp1_input.attr,
&dev_attr_temp1_label.attr,
NULL
};
ATTRIBUTE_GROUPS(sun4i_ts);
static int sun4i_ts_probe(struct platform_device *pdev)
{
struct sun4i_ts_data *ts;
struct device *dev = &pdev->dev;
struct device_node *np = dev->of_node;
struct device *hwmon;
int error;
u32 reg;
bool ts_attached;
u32 tp_sensitive_adjust = 15;
u32 filter_type = 1;
ts = devm_kzalloc(dev, sizeof(struct sun4i_ts_data), GFP_KERNEL);
if (!ts)
return -ENOMEM;
ts->dev = dev;
ts->ignore_fifo_data = true;
ts->temp_data = -1;
if (of_device_is_compatible(np, "allwinner,sun6i-a31-ts")) {
/* Allwinner SDK has temperature (C) = (value / 6) - 271 */
ts->temp_offset = 271000;
ts->temp_step = 167;
} else if (of_device_is_compatible(np, "allwinner,sun4i-a10-ts")) {
/*
* The A10 temperature sensor has quite a wide spread, these
* parameters are based on the averaging of the calibration
* results of 4 completely different boards, with a spread of
* temp_step from 0.096 - 0.170 and temp_offset from 176 - 331.
*/
ts->temp_offset = 257000;
ts->temp_step = 133;
} else {
/*
* The user manuals do not contain the formula for calculating
* the temperature. The formula used here is from the AXP209,
* which is designed by X-Powers, an affiliate of Allwinner:
*
* temperature (C) = (value * 0.1) - 144.7
*
* Allwinner does not have any documentation whatsoever for
* this hardware. Moreover, it is claimed that the sensor
* is inaccurate and cannot work properly.
*/
ts->temp_offset = 144700;
ts->temp_step = 100;
}
ts_attached = of_property_read_bool(np, "allwinner,ts-attached");
if (ts_attached) {
ts->input = devm_input_allocate_device(dev);
if (!ts->input)
return -ENOMEM;
ts->input->name = pdev->name;
ts->input->phys = "sun4i_ts/input0";
ts->input->open = sun4i_ts_open;
ts->input->close = sun4i_ts_close;
ts->input->id.bustype = BUS_HOST;
ts->input->id.vendor = 0x0001;
ts->input->id.product = 0x0001;
ts->input->id.version = 0x0100;
ts->input->evbit[0] = BIT(EV_SYN) | BIT(EV_KEY) | BIT(EV_ABS);
__set_bit(BTN_TOUCH, ts->input->keybit);
input_set_abs_params(ts->input, ABS_X, 0, 4095, 0, 0);
input_set_abs_params(ts->input, ABS_Y, 0, 4095, 0, 0);
input_set_drvdata(ts->input, ts);
}
ts->base = devm_ioremap_resource(dev,
platform_get_resource(pdev, IORESOURCE_MEM, 0));
if (IS_ERR(ts->base))
return PTR_ERR(ts->base);
ts->irq = platform_get_irq(pdev, 0);
error = devm_request_irq(dev, ts->irq, sun4i_ts_irq, 0, "sun4i-ts", ts);
if (error)
return error;
/*
* Select HOSC clk, clkin = clk / 6, adc samplefreq = clkin / 8192,
* t_acq = clkin / (16 * 64)
*/
writel(ADC_CLK_SEL(0) | ADC_CLK_DIV(2) | FS_DIV(7) | T_ACQ(63),
ts->base + TP_CTRL0);
/*
* tp_sensitive_adjust is an optional property
* tp_mode = 0 : only x and y coordinates, as we don't use dual touch
*/
of_property_read_u32(np, "allwinner,tp-sensitive-adjust",
&tp_sensitive_adjust);
writel(TP_SENSITIVE_ADJUST(tp_sensitive_adjust) | TP_MODE_SELECT(0),
ts->base + TP_CTRL2);
/*
* Enable median and averaging filter, optional property for
* filter type.
*/
of_property_read_u32(np, "allwinner,filter-type", &filter_type);
writel(FILTER_EN(1) | FILTER_TYPE(filter_type), ts->base + TP_CTRL3);
/* Enable temperature measurement, period 1953 (2 seconds) */
writel(TEMP_ENABLE(1) | TEMP_PERIOD(1953), ts->base + TP_TPR);
/*
* Set stylus up debounce to aprox 10 ms, enable debounce, and
* finally enable tp mode.
*/
reg = STYLUS_UP_DEBOUN(5) | STYLUS_UP_DEBOUN_EN(1);
if (of_device_is_compatible(np, "allwinner,sun6i-a31-ts"))
reg |= SUN6I_TP_MODE_EN(1);
else
{
reg |= SUN4I_TP_EN(1);
reg |= TP_MODE_EN(0);
reg |= ADC_CHAN_SELECT(2);
}
writel(reg, ts->base + TP_CTRL1);
/*
* The thermal core does not register hwmon devices for DT-based
* thermal zone sensors, such as this one.
*/
//hwmon_device_register_attr(ts->dev, "sun4i_ts");
hwmon = devm_hwmon_device_register_with_groups(ts->dev, "sun4i_ts",
ts, sun4i_ts_groups);
if (IS_ERR(hwmon))
return PTR_ERR(hwmon);
devm_thermal_zone_of_sensor_register(ts->dev, 0, ts, &sun4i_ts_tz_ops);
writel(TEMP_IRQ_EN(1), ts->base + TP_INT_FIFOC);
if (ts_attached) {
error = input_register_device(ts->input);
if (error) {
writel(0, ts->base + TP_INT_FIFOC);
return error;
}
}
platform_set_drvdata(pdev, ts);
return 0;
}
static int sun4i_ts_remove(struct platform_device *pdev)
{
struct sun4i_ts_data *ts = platform_get_drvdata(pdev);
/* Explicit unregister to avoid open/close changing the imask later */
if (ts->input)
input_unregister_device(ts->input);
/* Deactivate all IRQs */
writel(0, ts->base + TP_INT_FIFOC);
return 0;
}
static const struct of_device_id sun4i_ts_of_match[] = {
{ .compatible = "allwinner,sun4i-a10-ts", },
{ .compatible = "allwinner,sun5i-a13-ts", },
{ .compatible = "allwinner,sun6i-a31-ts", },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, sun4i_ts_of_match);
static struct platform_driver sun4i_ts_driver = {
.driver = {
.name = "sun4i-ts",
.of_match_table = of_match_ptr(sun4i_ts_of_match),
},
.probe = sun4i_ts_probe,
.remove = sun4i_ts_remove,
};
module_platform_driver(sun4i_ts_driver);
MODULE_DESCRIPTION("Allwinner sun4i resistive touchscreen controller driver");
MODULE_AUTHOR("Hans de Goede <hdegoede@redhat.com>");
MODULE_LICENSE("GPL");设备树添加RTP节点:
// SPDX-License-Identifier: (GPL-2.0+ OR X11)
/*
* Copyright 2018 Icenowy Zheng <icenowy@aosc.io>
* Copyright 2018 Mesih Kilinc <mesihkilinc@gmail.com>
*/
#include <dt-bindings/clock/suniv-ccu-f1c100s.h>
#include <dt-bindings/reset/suniv-ccu-f1c100s.h>
/ {
#address-cells = <1>;
#size-cells = <1>;
interrupt-parent = <&intc>;
clocks {
osc24M: clk-24M {
#clock-cells = <0>;
compatible = "fixed-clock";
clock-frequency = <24000000>;
clock-output-names = "osc24M";
};
osc32k: clk-32k {
#clock-cells = <0>;
compatible = "fixed-clock";
clock-frequency = <32768>;
clock-output-names = "osc32k";
};
};
cpus {
cpu {
compatible = "arm,arm926ej-s";
device_type = "cpu";
};
};
de: display-engine {
compatible = "allwinner,suniv-f1c100s-display-engine";
allwinner,pipelines = <&fe0>;
status = "disabled";
};
soc {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <1>;
ranges;
sram-controller@1c00000 {
compatible = "allwinner,suniv-f1c100s-system-control",
"allwinner,sun4i-a10-system-control";
reg = <0x01c00000 0x30>;
#address-cells = <1>;
#size-cells = <1>;
ranges;
sram_d: sram@10000 {
compatible = "mmio-sram";
reg = <0x00010000 0x1000>;
#address-cells = <1>;
#size-cells = <1>;
ranges = <0 0x00010000 0x1000>;
otg_sram: sram-section@0 {
compatible = "allwinner,suniv-f1c100s-sram-d",
"allwinner,sun4i-a10-sram-d";
reg = <0x0000 0x1000>;
status = "disabled";
};
};
};
tcon0: lcd-controller@1c0c000 {
compatible = "allwinner,suniv-f1c100s-tcon";
reg = <0x01c0c000 0x1000>;
interrupts = <29>;
clocks = <&ccu CLK_BUS_LCD>,
<&ccu CLK_TCON>;
clock-names = "ahb",
"tcon-ch0";
clock-output-names = "tcon-pixel-clock";
resets = <&ccu RST_BUS_LCD>;
reset-names = "lcd";
status = "disabled";
ports {
#address-cells = <1>;
#size-cells = <0>;
tcon0_in: port@0 {
#address-cells = <1>;
#size-cells = <0>;
reg = <0>;
tcon0_in_be0: endpoint@0 {
reg = <0>;
remote-endpoint = <&be0_out_tcon0>;
};
};
tcon0_out: port@1 {
#address-cells = <1>;
#size-cells = <0>;
reg = <1>;
};
};
};
ccu: clock@1c20000 {
compatible = "allwinner,suniv-f1c100s-ccu";
reg = <0x01c20000 0x400>;
clocks = <&osc24M>, <&osc32k>;
clock-names = "hosc", "losc";
#clock-cells = <1>;
#reset-cells = <1>;
};
intc: interrupt-controller@1c20400 {
compatible = "allwinner,suniv-f1c100s-ic";
reg = <0x01c20400 0x400>;
interrupt-controller;
#interrupt-cells = <1>;
};
pio: pinctrl@1c20800 {
compatible = "allwinner,suniv-f1c100s-pinctrl";
reg = <0x01c20800 0x400>;
interrupts = <38>, <39>, <40>;
clocks = <&ccu CLK_BUS_PIO>, <&osc24M>, <&osc32k>;
clock-names = "apb", "hosc", "losc";
gpio-controller;
interrupt-controller;
#interrupt-cells = <3>;
#gpio-cells = <3>;
uart0_pe_pins: uart0-pe-pins {
pins = "PE0", "PE1";
function = "uart0";
};
lcd_rgb666_pins: lcd-rgb666-pins {
pins = "PD0", "PD1", "PD2", "PD3", "PD4",
"PD5", "PD6", "PD7", "PD8", "PD9",
"PD10", "PD11", "PD12", "PD13", "PD14",
"PD15", "PD16", "PD17", "PD18", "PD19",
"PD20", "PD21";
function = "lcd";
};
rtp_pins: rtp-pins {
pins = "PA0", "PA1", "PA2", "PA3";
function = "rtp";
status = "okay";
};
mmc0_pins: mmc0-pins {
pins = "PF0", "PF1", "PF2", "PF3", "PF4", "PF5";
function = "mmc0";
};
};
rtp: rtp@1c24800 {
compatible = "allwinner,sun4i-a10-ts";
reg = <0x01c24800 0x100>;
interrupts = <20>;
allwinner,ts-attached;
#thermal-sensor-cells = <0>;
pinctrl-names = "default";
pinctrl-0 = <&rtp_pins>;
status = "okay";
};
timer@1c20c00 {
compatible = "allwinner,suniv-f1c100s-timer";
reg = <0x01c20c00 0x90>;
interrupts = <13>;
clocks = <&osc24M>;
};
mmc0: mmc@1c0f000 {
compatible = "allwinner,suniv-f1c100s-mmc",
"allwinner,sun7i-a20-mmc";
reg = <0x01c0f000 0x1000>;
clocks = <&ccu CLK_BUS_MMC0>,
<&ccu CLK_MMC0>,
<&ccu CLK_MMC0_OUTPUT>,
<&ccu CLK_MMC0_SAMPLE>;
clock-names = "ahb",
"mmc",
"output",
"sample";
resets = <&ccu RST_BUS_MMC0>;
reset-names = "ahb";
interrupts = <23>;
pinctrl-names = "default";
pinctrl-0 = <&mmc0_pins>;
status = "disabled";
#address-cells = <1>;
#size-cells = <0>;
};
wdt: watchdog@1c20ca0 {
compatible = "allwinner,suniv-f1c100s-wdt",
"allwinner,sun4i-a10-wdt";
reg = <0x01c20ca0 0x20>;
};
uart0: serial@1c25000 {
compatible = "snps,dw-apb-uart";
reg = <0x01c25000 0x400>;
interrupts = <1>;
reg-shift = <2>;
reg-io-width = <4>;
clocks = <&ccu CLK_BUS_UART0>;
resets = <&ccu RST_BUS_UART0>;
status = "disabled";
};
uart1: serial@1c25400 {
compatible = "snps,dw-apb-uart";
reg = <0x01c25400 0x400>;
interrupts = <2>;
reg-shift = <2>;
reg-io-width = <4>;
clocks = <&ccu CLK_BUS_UART1>;
resets = <&ccu RST_BUS_UART1>;
status = "disabled";
};
uart2: serial@1c25800 {
compatible = "snps,dw-apb-uart";
reg = <0x01c25800 0x400>;
interrupts = <3>;
reg-shift = <2>;
reg-io-width = <4>;
clocks = <&ccu CLK_BUS_UART2>;
resets = <&ccu RST_BUS_UART2>;
status = "disabled";
};
fe0: display-frontend@1e00000 {
compatible = "allwinner,suniv-f1c100s-display-frontend";
reg = <0x01e00000 0x20000>;
interrupts = <30>;
clocks = <&ccu CLK_BUS_DE_FE>, <&ccu CLK_DE_FE>,
<&ccu CLK_DRAM_DE_FE>;
clock-names = "ahb", "mod",
"ram";
resets = <&ccu RST_BUS_DE_FE>;
status = "disabled";
ports {
#address-cells = <1>;
#size-cells = <0>;
fe0_out: port@1 {
#address-cells = <1>;
#size-cells = <0>;
reg = <1>;
fe0_out_be0: endpoint@0 {
reg = <0>;
remote-endpoint = <&be0_in_fe0>;
};
};
};
};
be0: display-backend@1e60000 {
compatible = "allwinner,suniv-f1c100s-display-backend";
reg = <0x01e60000 0x10000>;
reg-names = "be";
interrupts = <31>;
clocks = <&ccu CLK_BUS_DE_BE>, <&ccu CLK_DE_BE>,
<&ccu CLK_DRAM_DE_BE>;
clock-names = "ahb", "mod",
"ram";
resets = <&ccu RST_BUS_DE_BE>;
reset-names = "be";
assigned-clocks = <&ccu CLK_DE_BE>;
assigned-clock-rates = <300000000>;
ports {
#address-cells = <1>;
#size-cells = <0>;
be0_in: port@0 {
#address-cells = <1>;
#size-cells = <0>;
reg = <0>;
be0_in_fe0: endpoint@0 {
reg = <0>;
remote-endpoint = <&fe0_out_be0>;
};
};
be0_out: port@1 {
#address-cells = <1>;
#size-cells = <0>;
reg = <1>;
be0_out_tcon0: endpoint@0 {
reg = <0>;
remote-endpoint = <&tcon0_in_be0>;
};
};
};
};
};
};最后在内核添加对项RTP的编译
make ARCH=arm menuconfig Device Drivers =>Hardware Monitoring support //启用这个项后,才可以看到后面的项 Device Drivers =>Input device support =>Touchscreens=>Allwinner sun4i resistive touchscreen controller support
这样就可以使用RTP了。
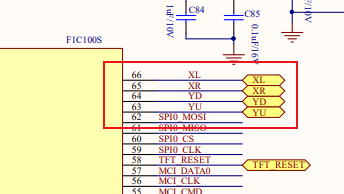
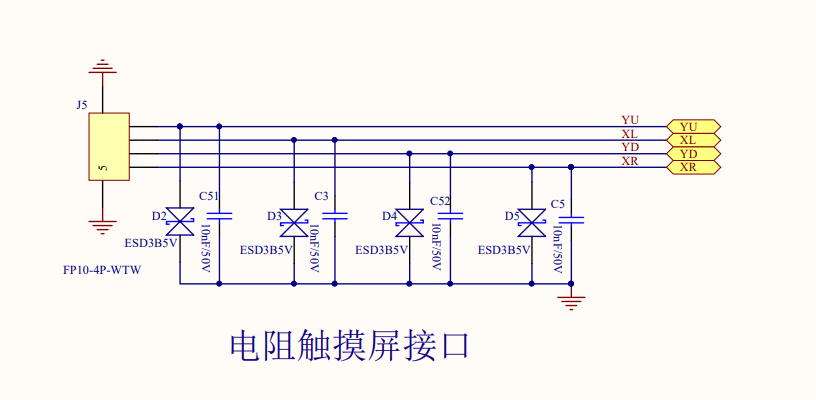
另外提供接口原理图:
打赏
 支付宝打赏
支付宝打赏
 微信打赏
微信打赏
支付宝打赏
微信打赏