STM32CubeMX系列教程15:看门狗(WDG)
一、看门狗简介
看门狗其实就是一个定时器,从功能上说它可以让微控制器在程序发生意外(程序进入死循环或跑飞)的时候,能重新回复到系统刚上电状态,以保障系统出问题的时候可以重启一次。说的复杂一点,看门狗就是能让程序出问题是能重新启动系统。
二、独立看门狗(IWDG)
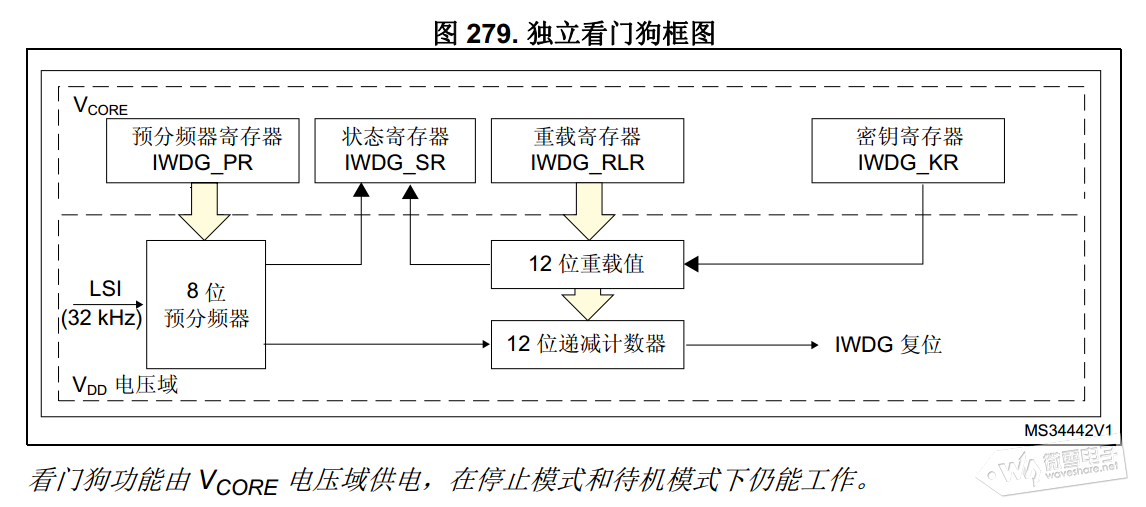
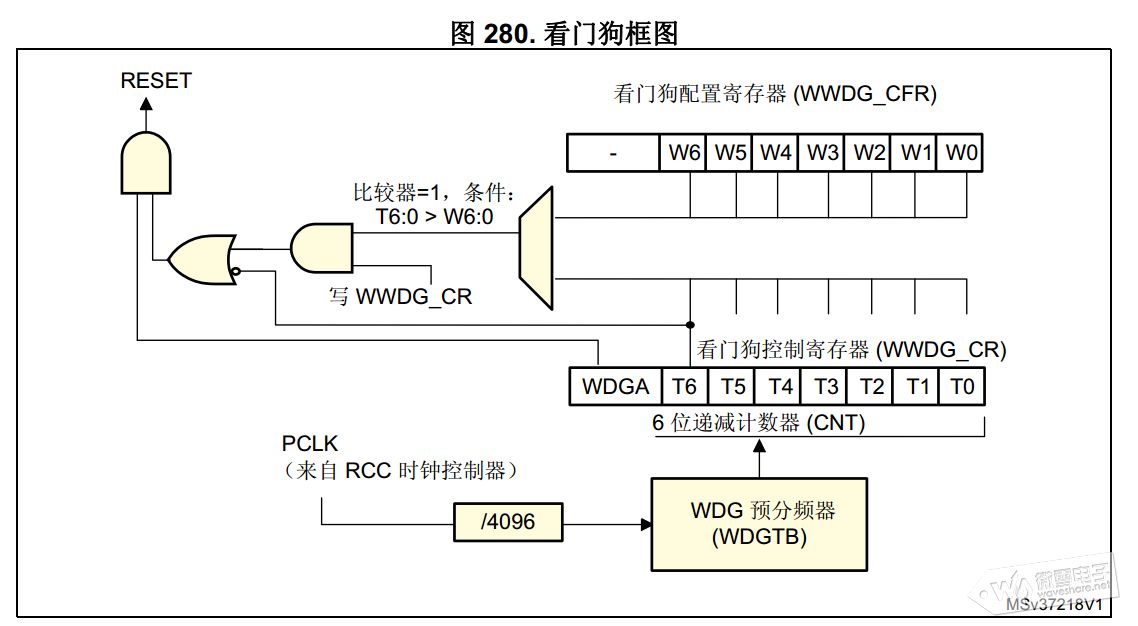
前文再续,书接上一会,上一章说到待机模式可以通过IWDG唤醒,独立看门口功能框图如下。实际上独立看门口狗就是一个递减计数器,当计时器的值减到0时,IWDG会产生一个复位信号,系统复位重新启动。为避免产生看门狗复位,则需在计数器减到0之前重载计数器,即“喂狗”。当程序出错时没有刷新计数器,计数器递减到0,系统复位重新启动,避免程序继续错误运行。
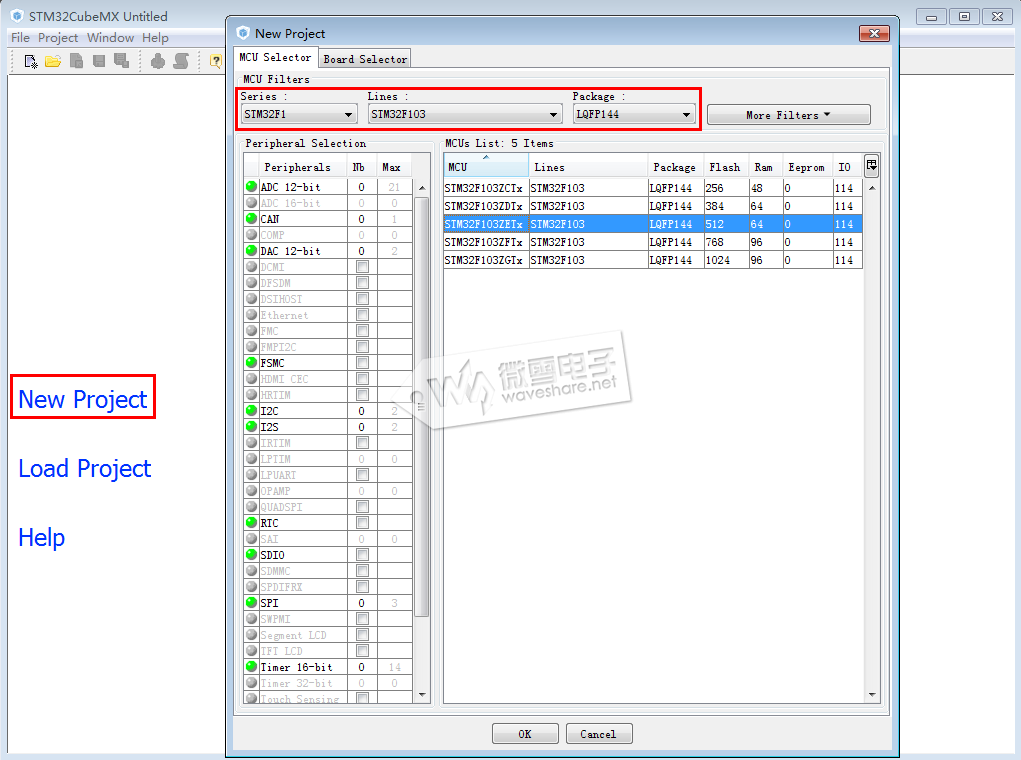
本章程序在串口printf工程的基础上修改,复制串口printf的工程,修改文件夹名。击STM32F746I.ioc打开STM32cubeMX的工程文件重新配置,开启独立看门狗(IWDG)。
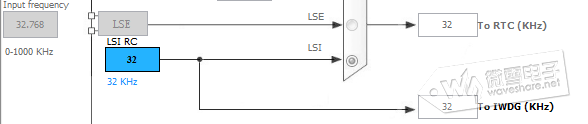
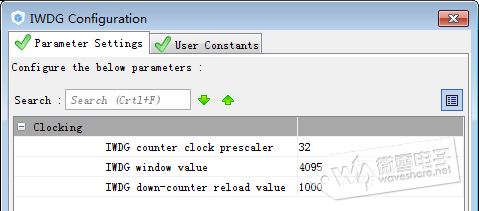
IWDG参数配置如下。IWDG的时钟为32kHz,此时设置计数器时钟为32分频,则分频后的时钟频率为1KHz.递减基础器重载值(down-counter reload value)配置为1000,即1000ms不刷新IWDG系统复位。IWDG窗口值(windows value)为默认不修改。当计数器的值大于窗口值时,如果执行重载操作,则会产生复位。
生成报告以及代码,编译程序。在iwdg.c文件中可以看到IWDG初始化函数。在stm32f7xx_hal_iwdg.h头文件中可以看到IWDG的操作函数。
在main()函数中开启IWDG.
/* USER CODE BEGIN 2 */
/* Start the IWDG */
HAL_IWDG_Start(&hiwdg);
printf("\n\r***** WaveShare Open7XXI-C Board *****\n\r");
/* USER CODE END 2 */在while循环中每延时800ms刷新一次IWDG,重载计数器。
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* Set counter reload value to obtain 1000ms IWDG TimeOut.
IWDG counter clock Frequency = LsiFreq / 32
Counter Reload Value = 1000 */
printf("\n\r Refreshes the IWDG !!!\n\r");
/* Refresh IWDG: reload counter */
HAL_IWDG_Refresh(&hiwdg);
HAL_Delay(800);
}
/* USER CODE END 3 */编译程序并下载到开发板。打开串口调试助手,设置波特率为115200,串口助手上面会显示如下信息。
当在while循环中注释掉HAL_IWDG_Refresh(&hiwdg)语句,不刷新计数器。重新编译程序时串口会输出如下信号,由于不刷新计数器,独立看门狗每1000ms复位重启一次。
再实际应用中,独立看门狗刷新操作不会再while循环中,而且也不好计算时间。一般都是通过定时器中断处理函数中刷新IWDG。
三、窗口看门狗(WWDG)
窗口看门狗相对独立看门狗对计数器的刷新时间要求更加严格。必须在限定的时间窗口内刷新计数器。
窗口看门狗激活情况下,满足以下条件会产生复位。
1.当递减计数器的值小于0x40时(即从0x40滚到0x3F)会产生复位。
2.当计数器值大于窗口寄存器的值时,如果软件重载计数器,则会产生复位。
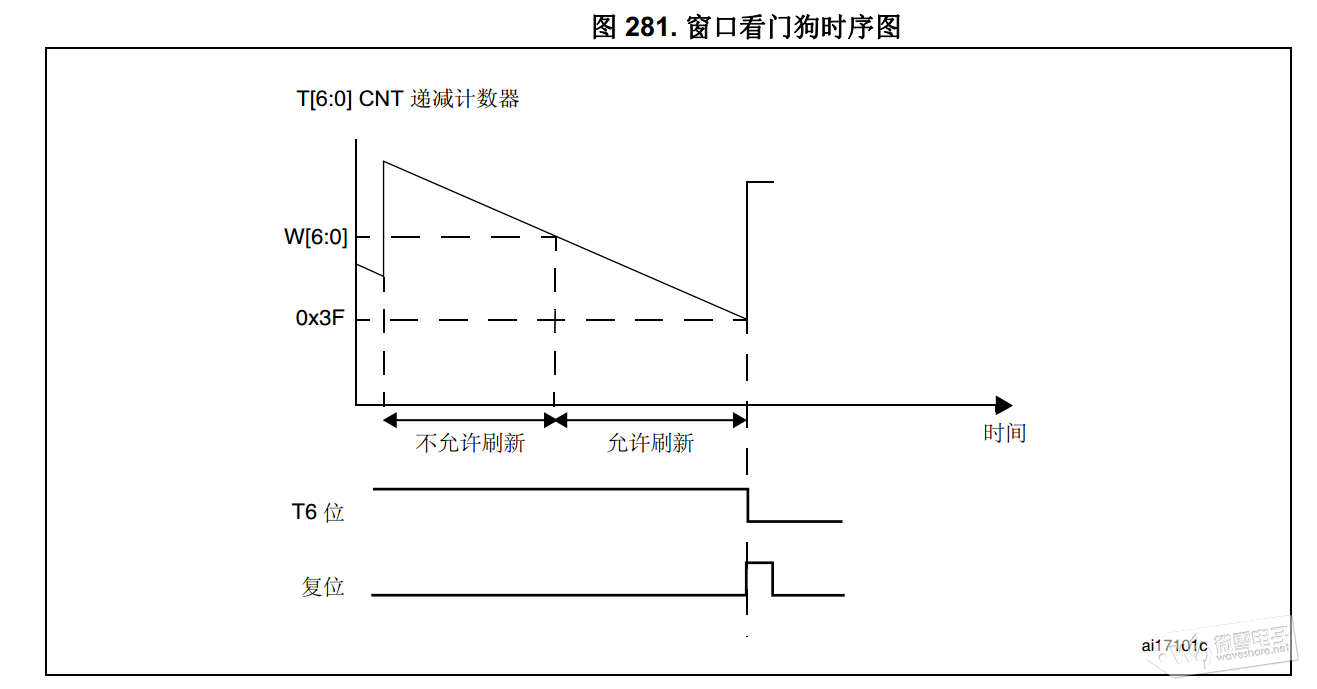
从上面的时序图中可以看到,如果递减计数器的值(T[6:0])大于窗口寄存器(W[6:0])的值,重载计数器会产生复位。当递减计时器的值小于0x40时,也会产生复位。所以只能在W[6:0] ~ 0x3F之间刷新,在窗口之外重载递减计数器时复位。存储在窗口寄存器(WWDG_CR)中的值必须介于0xFF和0xC0之间。开启窗口看门狗中断时,当递减计数器的值等于0x40时触发中断。
复制串口printf的工程,修改文件夹名。击STM32F746I.ioc打开STM32cubeMX的工程文件重新配置,开启窗口看门狗(WWDG)。
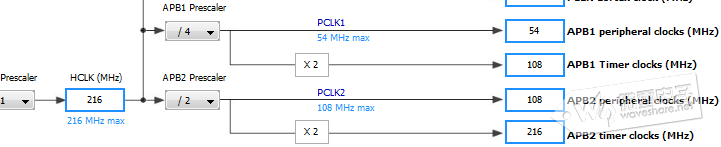
WWDG时钟是挂接到APB1上,系统时钟为216MHz时,PCLK1时钟为54MHz。
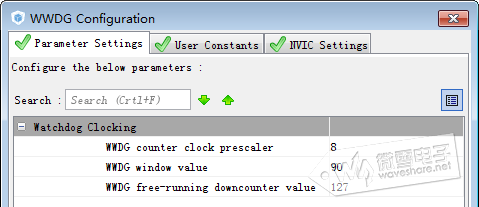
则WWDG计数器的频率为:(PCLK1 (54MHz)/4096)/8) = 1648 Hz (~607 us)
WWDG计数器刷新值为127,则超时时间为:~607 us * (127-63) = 39 ms
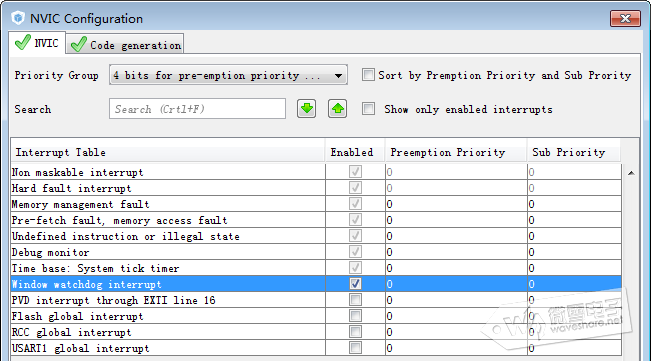
开启窗口看门狗中断。
生成报告以及代码,编译程序。在wwdg.c文件中可以看到WWDG初始化函数。在stm32f7xx_hal_wwdg.h头文件中可以看到IWDG的操作函数。
在main()函数中开启IWDG.
/* USER CODE BEGIN 2 */
/*##-1- Start the WWDG #####################################################*/
HAL_WWDG_Start_IT(&hwwdg);
printf("\n\r***** WaveShare Open7XXI-C Board *****\n\r");
/* USER CODE END 2 */在while循环中每延时1000ms输出一次信息。
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
printf("\n\r www.waveshare.net !!!\n\r");
HAL_Delay(1000);
}
/* USER CODE END 3 */在main.c文件后面添加WWDG中断回调函数,当递减计数器的值为0x40触发中断,中断处理函数中刷新WWDG。
/* USER CODE BEGIN 4 */
/**
* @brief Early Wakeup WWDG callback.
* @param hwwdg: pointer to a WWDG_HandleTypeDef structure that contains
* the configuration information for the specified WWDG module.
* @retval None
*/
void HAL_WWDG_WakeupCallback(WWDG_HandleTypeDef* hwwdg)
{
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_WWDG_WakeupCallback could be implemented in the user file
*/
/*##-2- Refresh the WWDG #####################################################*/
HAL_WWDG_Refresh(hwwdg, 127);
}
/* USER CODE END 4 */编译程序并下载到开发板。打开串口调试助手,设置波特率为115200,串口助手上面会显示如下信息。
当在WWDG中断回调函数中注释掉HAL_WWDG_Refresh(hwwdg, 127)语句,不刷新计数器。重新编译程序时串口会输出如下信号,由于不刷新计数器,独立看门狗每39ms复位重启一次。
打赏
 支付宝打赏
支付宝打赏
 微信打赏
微信打赏
支付宝打赏
微信打赏