

当前位置:首页
> 2017年12月 第2页
STM32CubeMX系列教程19:Quad-SPI
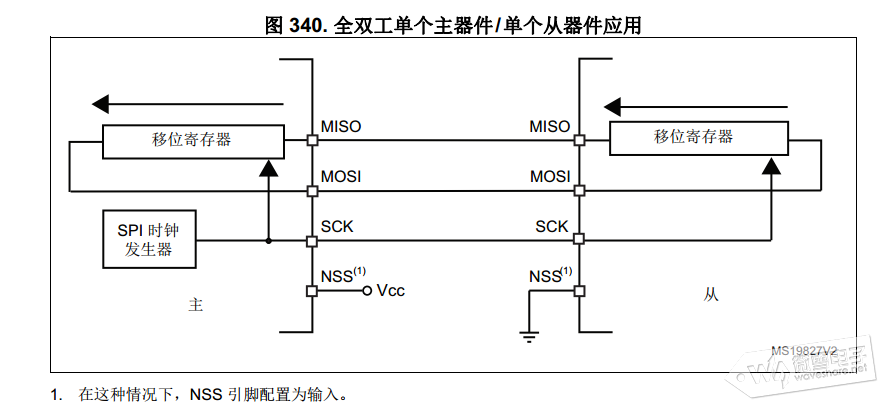
一.Quad-SPI简介 在第十章和第十一章中,我们介绍了标准的SPI总线,SPI由四根线控制,NSS为片选,SCK为时钟信号线。MISO,MOSI为数据线,一根作为输入,一根作为输出。 Quad-SPI,即四线SPI,由此可知其数据线比标准的SPI接口要多,最多支持四条数据线同时传输。连接单、双或四(条数据线) SPI Flash 存储介质。Quad-SPI总共有6根...
STM32CubeMX系列教程18:文件系统FATFS
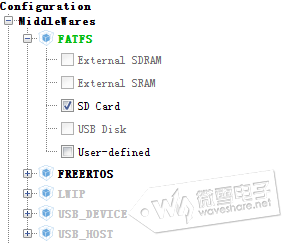
FATFS简介 FatFS是一个为小型嵌入式系统设计的通用FAT(File Allocation Table)文件系统模块。FatFs 的编写遵循ANSI C,并且完全与磁盘I/O层分开。它可以被嵌入到低成本的微控制器中,如AVR, 8051, PIC, ARM等等。兼容Windows文件系统。关于FATFS文件系统的API函数介绍,底层移植接口和例程等可以查到FATFS官网。FATFS官网...
STM32CubeMX系列教程17:SDMMC
一、SDMMC简介 MMC:MMC就是MultiMediaCard的缩写,即多媒体卡 SD:SD卡为Secure Digital Memory Card, 即安全数码卡 SDIO:SD Input Output 带有输入输出接口,SDIO是在SD标准上定义了一种外设接口SD种类 SD卡:<=2GB SDHC卡(SD High Capacity...
STM32CubeMX系列教程16:RNG和CRC
一、随机数发生器(RNG) RNG 处理器是一个以连续模拟噪声为基础的随机数发生器,在主机读数时提供一个 32 位的随机数。 复制串口printf的工程,修改文件夹名。击STM32F746I.ioc打开STM32cubeMX的工程文件重新配置,激活随机数发生器(RNG)。配置RNG时钟为48MHz。RNG没有参数配置。生成报告以及代码,编译程序。在iwdg.c文件中可以看到RNG初始化函数。在stm32f7xx_h...
STM32CubeMX系列教程15:看门狗(WDG)
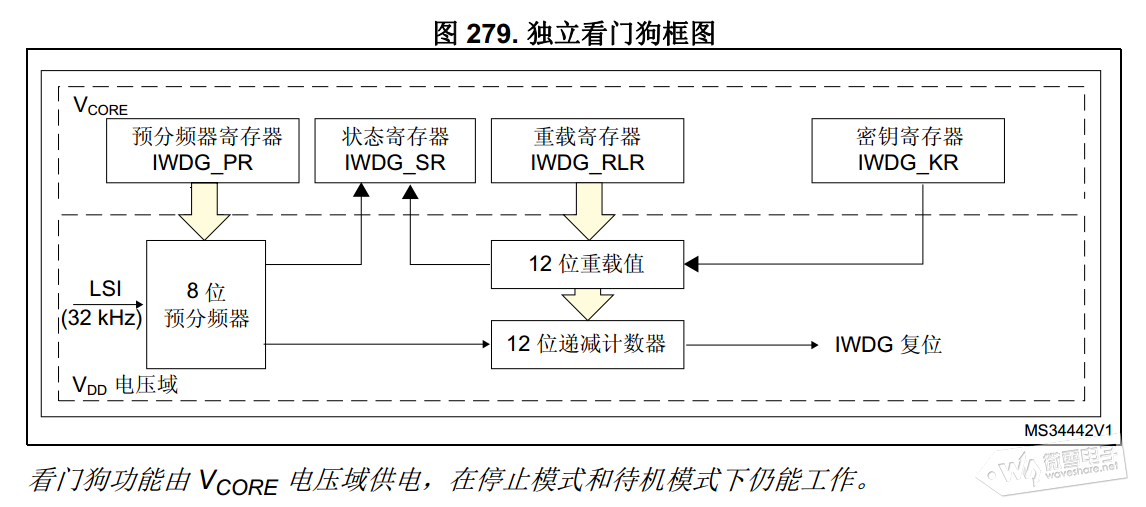
一、看门狗简介 看门狗其实就是一个定时器,从功能上说它可以让微控制器在程序发生意外(程序进入死循环或跑飞)的时候,能重新回复到系统刚上电状态,以保障系统出问题的时候可以重启一次。说的复杂一点,看门狗就是能让程序出问题是能重新启动系统。二、独立看门狗(IWDG) 前文再续,书接上一会,上一章说到待机模式可以通过IWDG唤醒,独立看门口功能框图如下。实际上独立看门口狗就是一个递减计...
STM32CubeMX系列教程14:电源控制器(PWR)
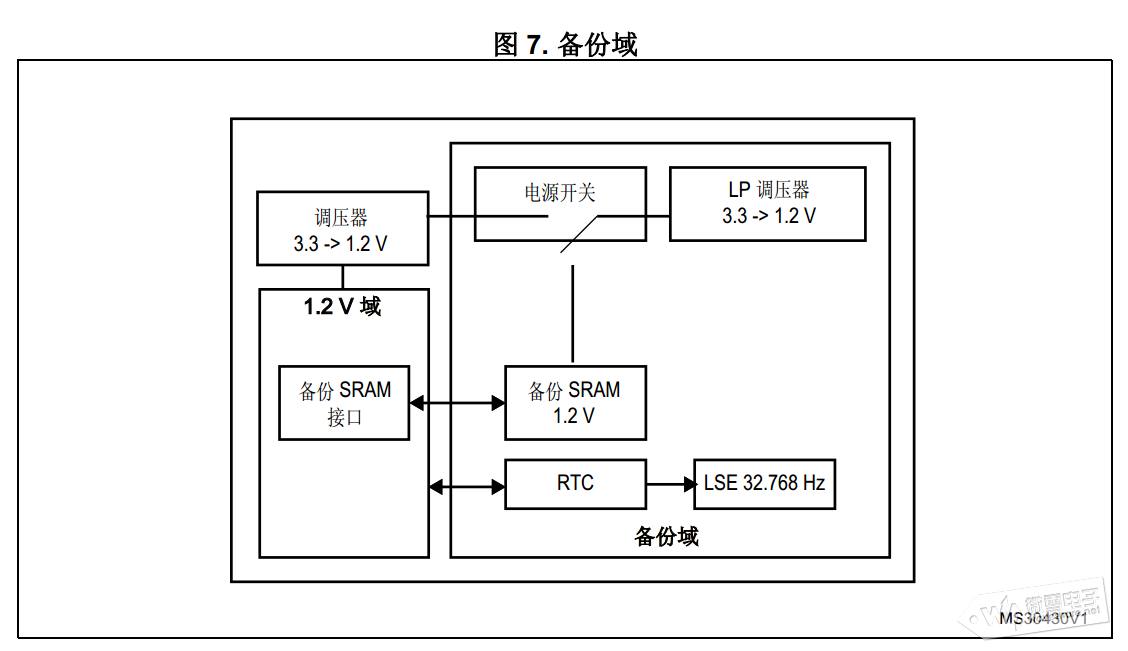
一.低功耗模式介绍 系统提供了多个低功耗模式,可在 CPU 不需要运行时(例如等待外部事件时)节省功耗。由用户根据应用选择具体的低功耗模式,以在低功耗、短启动时间和可用唤醒源之间寻求最佳平衡。 当系统断电时,仍然可以通过电池供电保留备份域的数据。备份域中包含RTC实时时钟,4KB备份SRAM以及调压器,调压器为备份域和待机电路以外...
STM32CubeMX系列教程13:实时时钟(RTC)
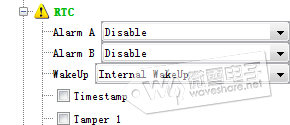
1.RTC简介 实时时钟 (RTC) 是一个独立的 BCD 定时器/计数器。 RTC 提供具有可编程闹钟中断功能的日历时钟 /日历。RTC 还包含具有中断功能的周期性可编程唤醒标志。 两个 32 位寄存器包含二进码十进数格式 (BCD) 的秒、分钟、小时( 12...
STM32CubeMX系列教程12:控制器局域网络(CAN)
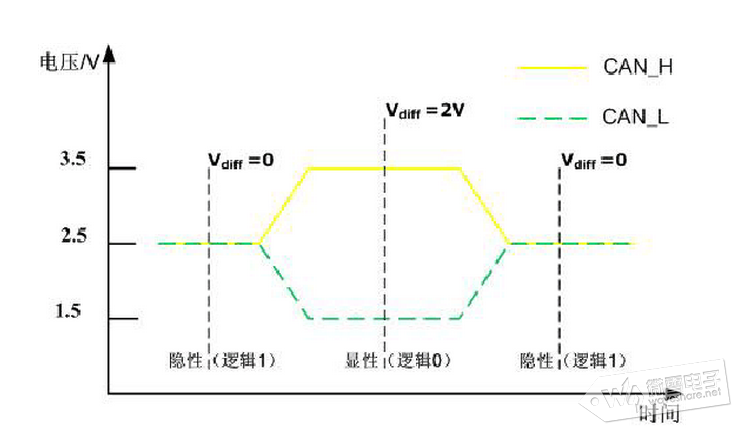
一.CAN简介 CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,是国际上应用最广泛的现场总线之一。 CAN控制器通过组成总线的2根线(CAN-H和CAN-L)的电位差来确定总线的电平,信号是以两线之间的“差分”电压形式出现,总线电平分为显性电平和隐性电平。 ...